پژوهشگران “دانشگاه توکیو”، حسگرهایی ابداع کردهاند که میتوانند امکان انعطافپذیری رباتها را بیشتر فراهم کنند.
رباتها را میتوان از مواد نرم ساخت اما انعطافپذیری چنین رباتهایی محدود به استفاده از حسگرهای سفت و سختی است که برای کنترل آنها ضروری هستند. پژوهشگران “دانشگاه توکیو” (UTokyo)، حسگرهایی ابداع کردهاند که میتوانند عملکرد حسگرهای معمول را داشته باشند اما انعطافپذیری رباتها را به میزان بیشتری به ارمغان بیاورند. انعطافپذیری رباتها میتوانند با کمک این حسگرهای جدید، سازگارتر و منعطفتر از رباتهایی با طراحی قدیمی باشند. پژوهشگران در طراحی این حسگرها، از روشهای یادگیری ماشینی استفاده کردهاند.
خودکارسازی، مفهومی در حال توسعه است و هسته این مفهوم را حوزههایی مانند علوم رباتیک و یادگیری ماشینی تشکیل میدهند. رابطه میان یادگیری ماشینی و علوم رباتیک، فقط به کنترل رفتار رباتها محدود نمیشود بلکه برای طراحی و عملکرد آنها مهم نیز هست. رباتی که در جهان واقعی کار میکند، باید بتواند از عهده درک محیط اطراف خود برآید و وظایف بسیاری را انجام دهد.
اگر جهان واقعی کاملا قابل پیشبینی بود، رباتها میتوانستند بدون نیاز به یادگیری در مورد محیط اطراف، عملکرد خوبی داشته باشند اما واقعیت، غیر قابل پیشبینی و پیوسته در حال تغییر است؛ در نتیجه یادگیری ماشینی باید به رباتها کمک کند تا با شرایط ناآشنا سازگار شوند. اگرچه این قاعده در مورد همه رباتها صدق میکند اما برای رباتهای نرم، مهمتر است زیرا ویژگیهای فیزیکی رباتهای نرم نسبت به همتایان آنها، کمتر قابل پیشبینی است.
ناکاجیما و گروهش تصمیم گرفتند یک مدل از رباتهای دارای ماهیچه مصنوعی پنوماتیکی را به کار بگیرند تا توانایی حفظ کنترل را در آن بررسی کنند اما ذات در حال تغییر این رباتها، با روشهای قدیمی مدلسازی مکانیکی سازگار نیست؛ در نتیجه آنها تصمیم گرفتند تا از یک روش یادگیری ماشینی قدرتمند و تثبیت شده موسوم به “رایانش مخزنی” (Reservoir computing) استفاده کنند. در این روش، اطلاعات مربوط به یک سیستم که در این مورد، رباتهای دارای ماهیچه مصنوعی پنوماتیکی هستند، به یک شبکه عصبی مصنوعی داده میشود؛ به همین دلیل این مدل همیشه در حال تغییر است و با محیط سازگار میشود.
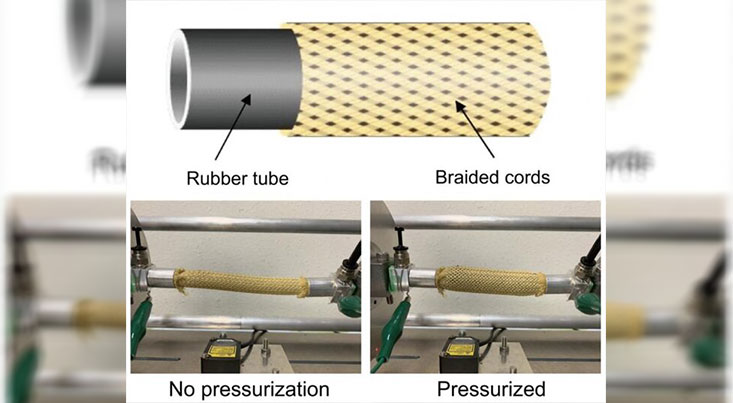
پروفسور “کوهی ناکاجیما” (Kohei Nakajima)، استادیار بخش علم و فناوری اطلاعات دانشگاه توکیو گفت: برای نمونه، رباتهای دارای “ماهیچه مصنوعی پنوماتیکی” (PAM) را در نظر بگیرید که باید برای حرکت، منقبض و منبسط شوند.
ناکاجیما ادامه داد: ما دریافتیم که مقاومت الکتریکی تغییرات رباتهای دارای ماهیچه مصنوعی، به شکل آنها بستگی دارد؛ در نتیجه دادهها را به شبکه انتقال دادیم تا شبکه بتواند حالتهای ربات را به دقت گزارش دهد. با این روش، ارائه نسل جدیدی از فناوری رباتهای نرم امکانپذیر میشود که میتوانند با انسانها همکاری کنند.
ناکاجیما افزود: پژوهش ما نشان میدهد که رایانش مخزنی میتواند کاربردهایی بیش از حوزه رباتیک داشته باشد. کاربردهای احساس کردن از راه دور که به اطلاعات زمان واقعی نیاز دارد، میتوانند مزایای بسیاری را ارائه دهند. شاید پژوهشگرانی که در حوزه “نورومورفیک” (neuromorphic) فعالیت میکنند، با کمک این روش بتوانند عملکرد سیستمهای خود را بهبود ببخشند.
گروهی از محققان با استفاده از تک لایه اتمی از جنس کربن، تراشهای حساس ساختند که قادر است مواد نشانگر بیماری را با حساسیت بالا شناسایی کند.
این گروه تحقیقاتی از گرافن برای تولید ساختاری طبل مانند استفاده کردند که میان گرافن و بستر زیرین یک میکرومتر فاصله است. این ساختار طبلی شکل قادر است مواد نشانگر بیماری نظیر پروتئین را در سیالهای بدن گیر انداخته و شناسایی کند. نتایج این پروژه در نشریه Nanoscale Advances به چاپ رسیده است.
این ابزار برای اندازهگیری زیستشناساگرها و تشخیص دقیق بیماریها اهمیت زیادی دارند؛ چرا که میتوانند اثرات دارویی و درمانی را برای بررسی عود و متاستاز مشخص کند. اگر بتوان با مقدار بسیار کمی از سیالات بدن نظیر ادرار، خون یا بزاق وضعیت فیزیکی بیمار را تشخیص داد، کنترل سریع و ارزان بیماری میسر میشود.
نشانگر، با استفاده از گرافن جذب شده و موجب تغییراتی در ساختار گرافن میشود و آن را به صورت گنبدی شکل در میآورد. این گروه با استفاده از خواص تداخل نور، قادر به تشخیص میزان تغییر شکل هستند و این کار با تغییر رنگ اتفاق میافتد. این حسگر، توانایی بررسی خون، ادرار و بزاق را داشته و با کمک آن میتوان بیماریهای مختلفی را شناسایی کرد.
پیش از این، گرافن بهعنوان پل استفاده شده بود تا فرآیند شناسایی را انجام دهد اما این ساختار به سادگی آسیب میدید. در این پروژه جدید، محققان یک ساختار طبل مانند ساختند که در آن گرافن بهگونهای قرار دارد که میتواند شرایط سیال محیط واکنش را تحمل کند. سطح گرافن با استفاده از آنتیبادی پوشش داده میشود تا بهعنوان یک حسگرزیستی عمل کند و زیستنشانگر را تشخیص دهد.
به دلیل فاصله یک میکرومتری گرافن با بستر نیمههادی، رنگ ساختار عوض میشود و درصورت قرار گرفتن زیستنشانگر روی سطح گرافن، رفتار نوری بستر تغییر میکند که از روی آن، زیستنشانگر قابل تشخیص است.
منبع: ایسنا